

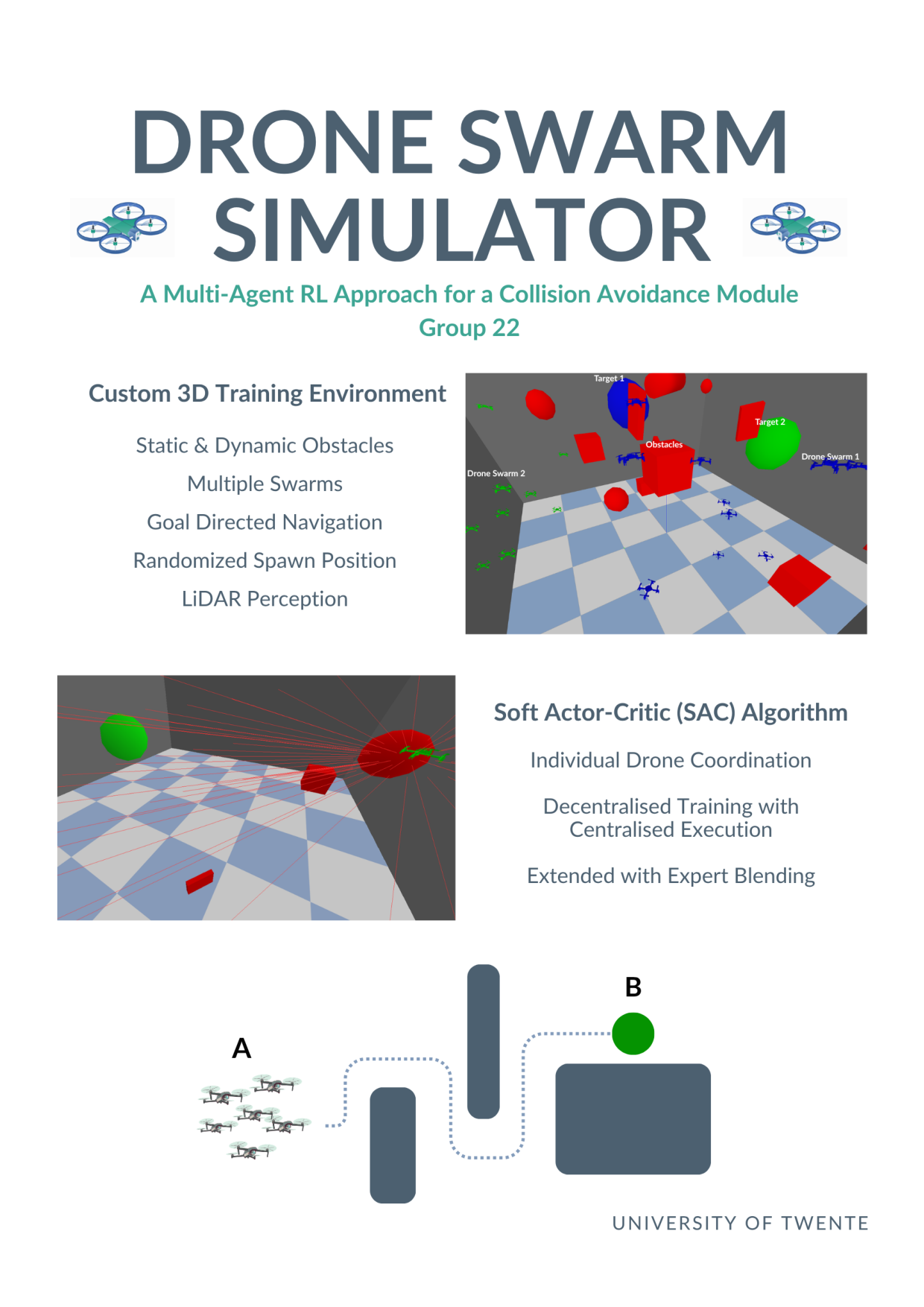
This project requested the extension of an existing two-dimensional simulation into a three dimensional collision avoidance module. This system enables unmanned aerial vehicle (UAVs) swarm(s) to navigate towards a given destination while avoiding both static and dynamic obstacles, as well as one another. The goal of this project is to design, implement and validate the collision avoidance module that can potentially be integrated into existing UAV control stacks. The implementation builds upon the original Proximal Policy Optimization (PPO)-based reinforcement learning (RL) approach and transitions to a multi-agent Soft Actor-Critic (SAC) algorithm, which is supported by high-fidelity sensors within the 3D environment, namely LiDAR. Each drone operates as a semi-autonomous agent, meaning it has partial observability of its surrounding environment and must make decisions based purely on local information. Through this iterative training, the drones learn policies that allow them to avoid collisions, maintain a safe distance from one another and reach destinations efficiently.
The CS Design Project module is one of the two final modules of the Bachelor. In the design component of this module, students show that they master the entire design trajectory, from the first informal specification of requirements by a client to the delivery and presentation of a well-documented working product. Projects are submitted by clients from either inside or outside the University. Students perform the project in groups of 3-5 students under the supervision of a teacher from the Department of Computer Science. The supervisor is also the one who assesses the process and products of the group. Project deliverables include a project proposal, a design report, a presentation and a poster.
View the full design report for this project.
This project requested the extension of an existing two-dimensional simulation into a three dimensional collision avoidance module. This system enables unmanned aerial vehicle (UAVs) swarm(s) to navigate towards a given destination while avoiding both static and dynamic obstacles, as well as one another. The goal of this project is to design, implement and validate the collision avoidance module that can potentially be integrated into existing UAV control stacks. The implementation builds upon the original Proximal Policy Optimization (PPO)-based reinforcement learning (RL) approach and transitions to a multi-agent Soft Actor-Critic (SAC) algorithm, which is supported by high-fidelity sensors within the 3D environment, namely LiDAR. Each drone operates as a semi-autonomous agent, meaning it has partial observability of its surrounding environment and must make decisions based purely on local information. Through this iterative training, the drones learn policies that allow them to avoid collisions, maintain a safe distance from one another and reach destinations efficiently.
The CS Design Project module is one of the two final modules of the Bachelor. In the design component of this module, students show that they master the entire design trajectory, from the first informal specification of requirements by a client to the delivery and presentation of a well-documented working product. Projects are submitted by clients from either inside or outside the University. Students perform the project in groups of 3-5 students under the supervision of a teacher from the Department of Computer Science. The supervisor is also the one who assesses the process and products of the group. Project deliverables include a project proposal, a design report, a presentation and a poster.
View the full design report for this project.